

Pix4DcaptureЪЧвЛПюЪ§ОнВЩМЏШэМўЃЌУтЗбЕФвЦЖЏЖЫЗЩааЙцЛЎappЃЌЪЕЯжЮоШЫЛњзюМбВтЛцКЭНЈФЃЃЌЬсЙЉАВзПАцКЭiosАцЃЌЧсЫЩЙцЛЎВЂжДааЮоШЫЛњЗЩааЕФЛцЭМКЭ3DФЃаЭЁЃ
СщЛюЃКПижЦЖра§вэКЭЙЬЖЈвэЮоШЫЛњЗЩааЁЃПижЦПЩМћЙтЃЌЖрЙтЦзКЭШШКьЭтЯрЛњХФееЃЌЙцЛЎКЭжДааЗЩааШЮЮёЃЌЮоТлгаЮоЛЅСЊЭјЁЃ
ОЋзМЃКИљОнЕиУцЗжБцТЪЖЈвхЗЩааИпЖШЃЌЩшжУЯрЛњХФЩуНЧЖШЃЌгАЯёжиЕўТЪКЭЗЩааЫйЖШ
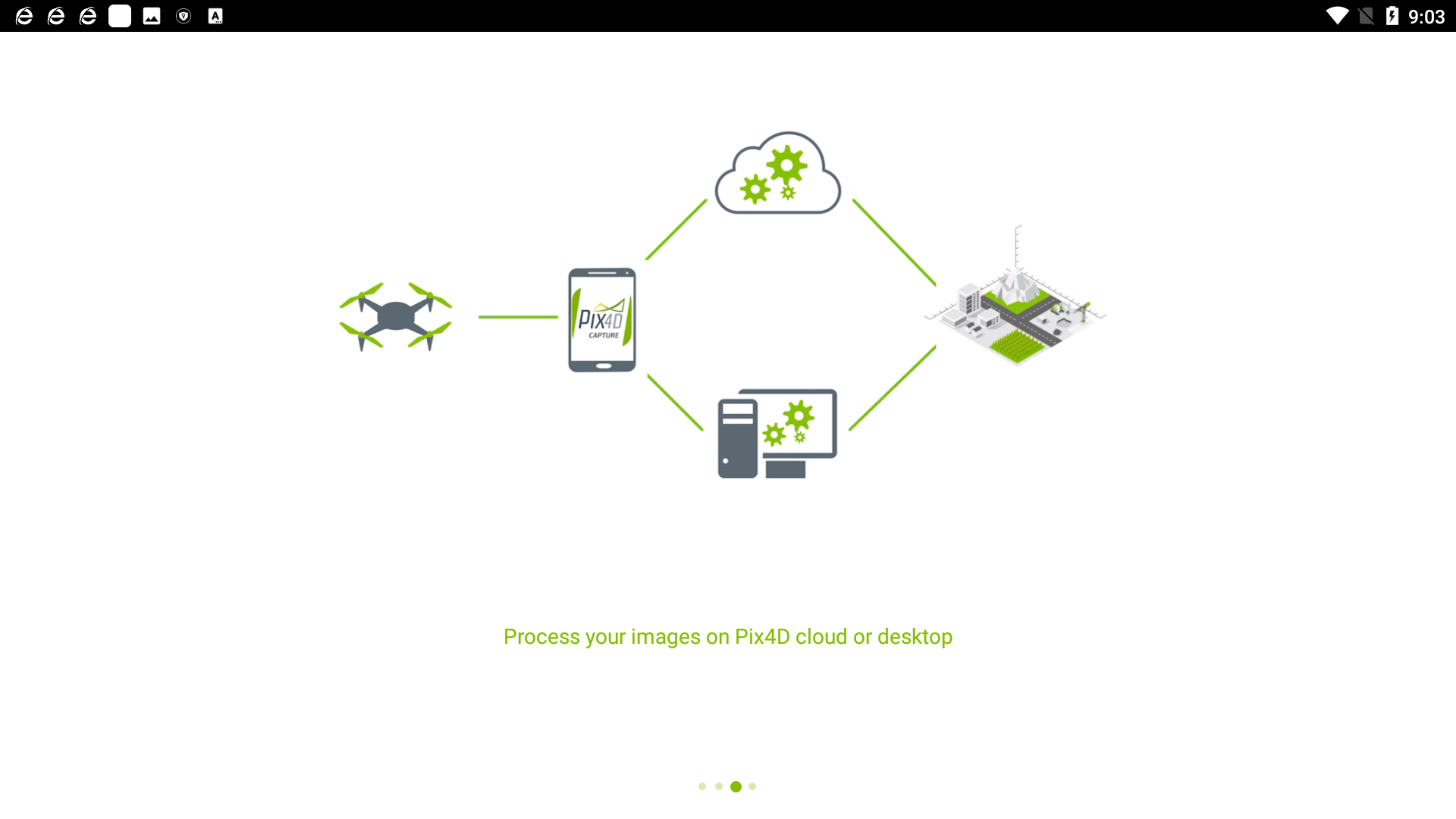
здЖЏЃКНЋгАЯёжБНгДгвЦЖЏЩшБИЩЯДЋЕНPix4DдЦЦНЬЈНјааДІРэ
* ШЋздЖЏЮоШЫЛњВтЛц
* ЭМЯёВЩМЏЦкМфЕФЮоШЫЛњвЃВтКЭЩуЯёЭЗЪЕЪБРЁЫЭ
* еыЖдВЛЭЌашЧѓЕФВЛЭЌЗЩааМЦЛЎ
- гУгквЛАугГЩфЕФЖрБпаЮШЮЮё
- вЛАуЕиЭМЕФЭјИёШЮЮё
- ЫЋЭјИёШЮЮёПЩЪЕЯжИќКУЕФ 3D ФЃаЭжиНЈ
- гУгкаЫШЄЕу 3D ФЃаЭжиНЈЕФбЛЗШЮЮё
- ЪЙгУЪжЖЏЗЩааПижЦНјааДЙжБЖдЯѓгГЩфЕФУтЗбЗЩааШЮЮё
* УПИіШЮЮёЕФЗЩааВЮЪ§ЁЊЁЊе§УцКЭВрУцЭМЯёжиЕўЁЂЩуЯёЛњНЧЖШЁЂИпЖШЁЂGSDЁЂЗЩааЫйЖШЁЊЁЊПЩвдИљОнЧјгђЕФвЊЧѓНјааЕїећЁЃ
* БЃДцЛђИДжЦШЮЮёвдЖрДЮЗЩааЯрЭЌЕФИааЫШЄЧјгђ
* ЪЙгУРыЯпЕиЭМНЋЕзЭМгыФњЕФЗЩааМЦЛЎвЛЦ№ДцДЂ
* ИќИФНжЕР/ЮРаЧЕзЭМЬсЙЉЩЬ
* Pix4D ДІРэШэМўЕФЮоЗьЙЄзїСїГЬ
* ДгЮоШЫЛњЕНЩшБИЕФздЖЏЭМЯёДЋЪф
* НЋЭМЯёжБНгДгЩшБИЩЯДЋЕНдЦЖЫЕФ Pix4D ШэМўНјааДІРэ
ЃЈашвЊаэПЩжЄЃЉ
ЪЙгУ Pix4D дкдЦЖЫЛђзРУцЩЯЕФШэМўНјааЗЩааКѓДІРэКЭЗжЮіЃК
* ДгЧсЧЩНєДеЕФЯрЛњЕНДѓЛЗљЙЋжЦЯрЛњЃЌЪЕЯжВтСПМЖНсЙћ
* ЪЙгУЕиУцПижЦЕу (GCP) РДЬсИпФЃаЭЕФЯрЖдКЭОјЖдОЋЖШ
* ЩњГЩКЭаоИФ
- ЕудЦ
- е§ЩфЯтЧЖ
- Ъ§зжИпГЬФЃаЭ (DSM/DTM)
- Ыїв§ЭМЃЈР§Шч NDVIЃЉ
- КЭИќЖр
* ВтСПОрРыЁЂБэУцКЭЬхЛ§
бЁдёЮоШЫЛњЃКPIX4DcaptureжЇГжЪаГЁЩЯШ§ДѓЮоШЫЛњжЦдьЩЬЕФЩшБИЃКДѓНЎЃЌХЩХЕЬиКЭъЛЯшЁЃPIX4DcaptureЖРМвжЇГжХЩХЕЬиЕФBluegrassКЭDisco-Pro AGХЉвЕЖЈжЦЮоШЫЛњЁЃ

бЁдёКНЯпФЃЪНЃКеыЖдВЛЭЌашЧѓЃЌбЁдёВЛЭЌФЃЪНЁЃ PIX4DcaptureОпгаЮхжжКНЯпФЃЪНЃЌЮЊФњЬсЙЉИќЖрСщЛюадЁЃ
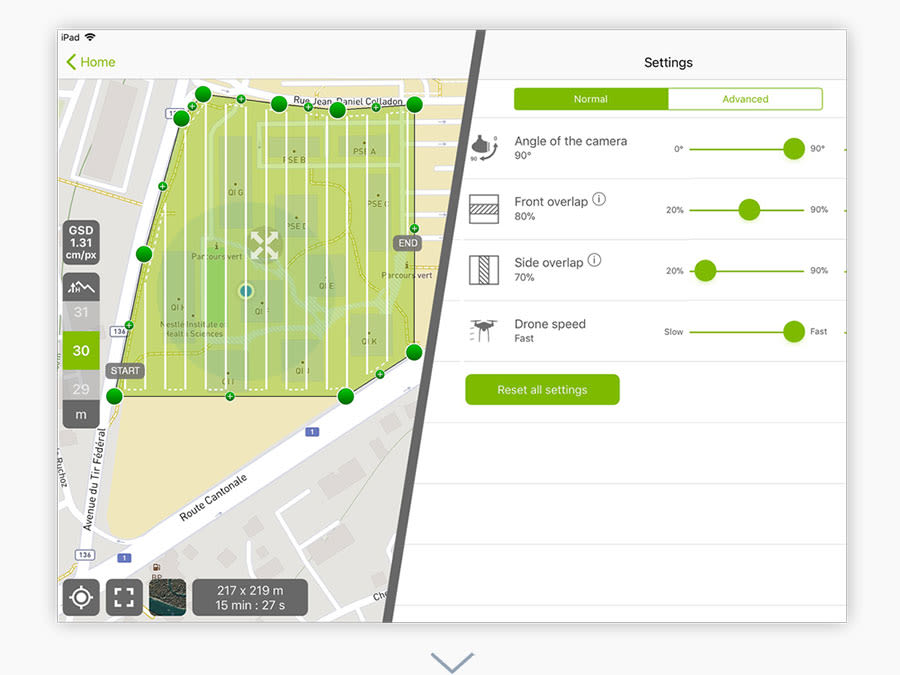
ЕїећКНЯпКЭВЮЪ§ЃКдкЕиЭМЩЯЧсЫЩЬэМгВЂЕїећЗЩааЧјгђЁЃздЖЈвхгАЯёжиЕўТЪЃЌЯрЛњНЧЖШЃЌЗЩааИпЖШЕШВЮЪ§ЁЃ

ПЊЪМЗЩааЃКПЊЪМЗЩааЃЌЪЙгУЕиЭМЪгЭМКЭЯрЛњЪгЭМНјааЪЕЪБМрВтЁЃЕиЭМЪгЭМЬсЙЉЪЕЪБЗЩааЪ§ОнЃЌШчЗЩааИпЖШЁЂЗЩааЫйЖШЕШаХЯЂЁЃЛђбЁдёЯрЛњЪгЭМРДЙлПДЪЕЪБЭМДЋЁЃ

МьВщХФЩуНсЙћЃКдкЯжГЁОЭПЩвдМьВщХФЩуГЩЙћЃЌБмУтЗЕЙЄДјРДЕФВЛБуЁЃ

здЖЏЩЯДЋЃКАбгАЯёЩЯДЋЕНPix4DдЦЦНЬЈЃЌЩњГЩПЩгІгУгкИїжжаавЕЕФ2DЛђ3DЕиЭМКЭФЃаЭЃЌР§ШчНЈжўЃЌХЉвЕЃЌЙЋЙВАВШЋЕШЁЃ

ЯЬФћЖЬОчУтЗбЙлПДШэМўЯТдиАВзА

ПДПДЯРappЙйЗНзюаТАцЯТди

ЩљЦЦЬьspotifyзюаТАцЯТдиАВзА

ырырОчШЅЙуИцЯТдизюаТАцБО

гАЪгВжtvАцЙйЗНЯТдиАВзААќ2025зюаТАц

dockРИБкжНЩњГЩЦїЯТди(DockWalls)

ЗЙЭХЩчФЃзщappЙйЗНЯТди

omofunДПОЛАцАВзПЯТди2025зюаТАц
![]() Windows 7жЇГж( 0 ) ИЧТЅ(ЛиИД)
Windows 7жЇГж( 0 ) ИЧТЅ(ЛиИД)
![]() Windows 10жЇГж( 0 ) ИЧТЅ(ЛиИД)
Windows 10жЇГж( 0 ) ИЧТЅ(ЛиИД)
 ЗЩЪщappАВзПШэМўЯТди
ЗЩЪщappАВзПШэМўЯТди Ш§ИіАяappЯТдизюаТАц
Ш§ИіАяappЯТдизюаТАц УРЙмМгЪевјЯЕЭГЕЧТМЪжЛњАцappЯТдиАВзА
УРЙмМгЪевјЯЕЭГЕЧТМЪжЛњАцappЯТдиАВзА ШЋгяЭЈЛсвыЙйЗНЯТди
ШЋгяЭЈЛсвыЙйЗНЯТди дЦЕнАВЮяСїЙмПиЦНЬЈappзюаТАц
дЦЕнАВЮяСїЙмПиЦНЬЈappзюаТАц ШЋЪгЭЈдЦЛсвщЯТди
ШЋЪгЭЈдЦЛсвщЯТди ШЋЪБдЦЛсвщappЙйЗНЯТдиАВзА
ШЋЪБдЦЛсвщappЙйЗНЯТдиАВзА ЭјИёЭЈЧўЕРАцжаЙњвЦЖЏзюаТАц
ЭјИёЭЈЧўЕРАцжаЙњвЦЖЏзюаТАц КўФЯЦѓвЕЕЧМЧАВзПзюаТАцБО
КўФЯЦѓвЕЕЧМЧАВзПзюаТАцБО ОЉЖЋMEАВзПАцЯТди
ОЉЖЋMEАВзПАцЯТди вЛМќЭЈappЯТдиАВзП
вЛМќЭЈappЯТдиАВзП дЫТњТњЛѕжїАцевГЕЯТдизюаТАц
дЫТњТњЛѕжїАцевГЕЯТдизюаТАц Л№М§ШЫappзюаТАц
Л№М§ШЫappзюаТАц СЂПЩЦИappзюаТАцЯТди
СЂПЩЦИappзюаТАцЯТди officeЮФЕЕВщПДЦїМђЬхжаЮФАцШЅЙуИцappНтЫјзЈвЕАц
officeЮФЕЕВщПДЦїМђЬхжаЮФАцШЅЙуИцappНтЫјзЈвЕАц ПЊЛсБІдЦЛсвщ3.9.8АВзААцЯТди
ПЊЛсБІдЦЛсвщ3.9.8АВзААцЯТди
 жїЬтУРЛЏ /
жїЬтУРЛЏ / 
 СФЬьНЛгб /
СФЬьНЛгб / 


 АьЙЋгІгУ /
АьЙЋгІгУ / 
 АьЙЋгІгУ /
АьЙЋгІгУ / 
 ЮоЯожЦaiСФЬьШэМў
ЮоЯожЦaiСФЬьШэМў
 ецШЫСФЬьШэМў
ецШЫСФЬьШэМў
 xxxiranookзджЦгЮЯЗ
xxxiranookзджЦгЮЯЗ
 7723ФкжУВЫЕЅгЮЯЗДѓШЋ
7723ФкжУВЫЕЅгЮЯЗДѓШЋ
вбОгУЙ§МИДЮСЫЃЌдкОРњСЫвЛаЉаЁЮЪЬтКѓЃЌЯждкБэЯжКмКУЁЃ
вўВидкХрбЕЪгЦЕжаЕФвЛИіЙиМќЬсЪОЪЧЦєЖЏФњЕФ DJI ЮоШЫЛњЃЌЦєЖЏ DJI гІгУГЬађвдбщжЄвЛЧае§ГЃЃЌШЛКѓЭъШЋЭЃжЙ DJI гІгУГЬађЁЃетЮЊЮвНтОіСЫЫљгаЖГНсКЭУЛгаЭМЯёЕФЮЪЬтЁЃ
ЫћУЧЫЦКѕе§дкХЌСІЬэМгЙІФмЃКЯждкПЩвддк IOS ЩЯЛёЕУЦШЧаашвЊЕФШЮЮёдЄМЦЛЎЁЃШдШЛШБЩйЖрЕчГиЗЩааЃЌОЁЙмзРУцгІгУГЬађжаЕФЯюФПКЯВЂЙІФмЖдДЫгаЫљАяжњ